- A+
来源:DeepTech深科技
据了解,自动驾驶技术的发展主要依赖于传统的强化学习和深度学习方法。传统的强化学习方法一般通过让自动驾驶车辆在模拟环境中不断试错,来学习最优的驾驶策略。
这些方法虽然在一定程度上能够模拟人类驾驶行为,但在复杂的实际道路环境中,仍然面临着许多挑战。
具体来说:
首先,传统的强化学习方法在处理多变的道路状况和多样的驾驶行为时,往往需要大量的训练数据和计算资源。
此外,这些方法通常缺乏对人类驾驶员行为的全面理解,导致在实际应用中表现出不够智能和不够安全的缺点。
例如,在面对紧急情况时,自动驾驶系统可能无法像人类驾驶员一样迅速做出反应,以至于会增加事故风险。
其次,现有的自动驾驶模型大多依赖于预先定义的规则和参数,这使得它们在应对复杂和动态的道路环境时,存在灵活性不足和适应性不足的问题。
尤其是在多车互动和行人复杂的城市环境中,传统方法很难保证安全性和驾驶体验的一致性。
尽管深度学习在感知和决策方面取得了一定进展,但其“黑盒”特性导致模型的决策过程变得难以解释,着进一步限制了其在自动驾驶领域的应用。
同时,现有方法在训练过程中主要依靠模拟数据,缺乏足够的现实环境中的人类反馈,这使得模型在实际应用中的表现不尽如人意。
总的来说,虽然传统的强化学习和深度学习方法在自动驾驶技术发展中发挥了重要作用,但是仍然面临着模型复杂度高、解释性差、训练数据需求量大、以及难以应对实际道路复杂情况等问题。
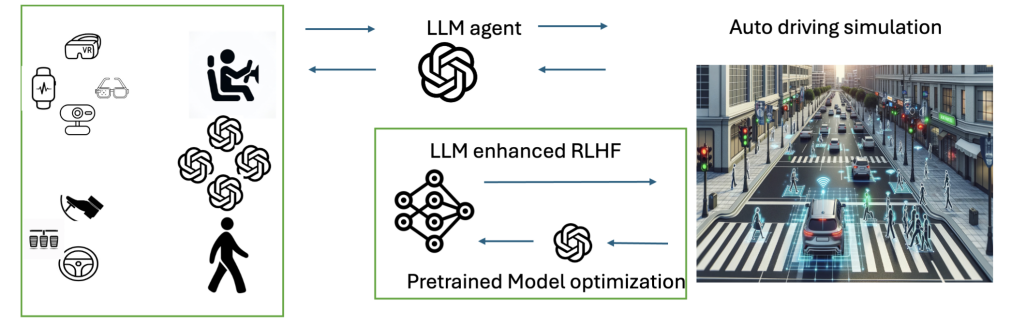
为此,美国罗格斯大学博士生孙媛和所在团队,于近日提出一种新型自动驾驶优化方法。
研究中,他们首次将人类反馈机制用于自动驾驶模型的优化中,通过将强化学习与大模型相结合,不仅提升了模型的性能,还提高了自动驾驶的安全性和可靠性。
而在未来,该团队将采取四步走的研究策略:
首先,将进一步深化多模态数据融合技术的研究,优化不同传感器数据之间的融合方式,特别是优化在高动态环境下和复杂环境下的应用能力。
其将通过采用更高效的算法,如图网络和深度学习模型,力争提高系统在各种驾驶场景中的鲁棒性和准确性。
其次,将在人类反馈机制的应用上做进一步探索。
通过收集更多样化的生理和心理数据,课题组希望能进一步提升模型的精度和对人类驾驶习惯的理解,从而优化自动驾驶系统的决策过程。
另外,将把现有模型部署到真实世界的测试环境中,通过更多的物理实验验证模型在实际驾驶条件下的性能。
特别是在恶劣天气和夜间驾驶等复杂场景中,该团队希望能验证并提高系统的通用性和适应性。
最后,将研究如何提升模型的可解释性和透明度,使自动驾驶系统的决策过程更加清晰易懂,增强用户对系统的信任。
这包括通过改进算法和优化数据处理流程,使模型的输出更直观和易于理解等。
通过这些后续研究,他们希望不仅能提升自动驾驶技术的整体性能,还能确保其更贴近人类驾驶行为,为实现更安全、更智能的自动驾驶技术奠定基础。
参考资料:
1.https://arxiv.org/abs/2406.04481
运营/排版:何晨龙



